The fire management in rack type warehouses is a very important and essential element. Usually, a fire is first produced smoke, then a flame is produced, leading to a fire. Generally, smoke detection systems have smoke detectors installed in all of the rack spaces and detect smoke early on and deliver the correct location. However, if there is not enough space in the rack to install smoke detectors, or if all racks do not have smoke detectors installed, one smoke detector is installed at the top of the rack to manage the surrounding racks. If the smoke detector detects smoke in this configuration, it is not possible to determine which of the grouped racks is generating smoke. Therefore, this study proposes a system to efficiently locate the position of the smoke-producing racks. For this purpose, the camera is installed on a stacker crane that loads and leaves products in a rack warehouse. Image frames are transmitted in real time from fixed cameras so that the difference images are calculated reliably. The images obtained detect the direction of smoke using a technique called dense optical flow, an algorithm that detects the movement of an object. The purpose of this paper is to develop a highly reliable fire detection system that detects the location of the racks in which smoke occurs by moving the stacker cranes in the detected direction and repeatedly.
최근 rack형 창고에서 화재가 발생하면 적재되어 있는 물품이 모두 소실되어 큰 피해를 입는 경우가 대부분이다. 하지만 rack형 창고는 선반형 구조로 공간을 합리적으로 활용하며 저장 용량을 최대한으로 늘릴 수 있다. 또한 rack에 적재된 제품 은 서로 압착되지 않고 제품의 기능을 완전히 보장하므로 제품의 손실을 없앨 수 있는 장점이 있다[1].
rack형 자동화 창고 특성상 상주 인원이 비교적 적은 편으로 화재 발생시 화재 사실을 직접 발견 할 수 있는 확률이 낮아진다[2]. 그래서 일반적인 rack형 자동화 창고에 있는 화재 감지 시스템은 모든 rack 위치에 연기감지기를 설치하여 화재의 초기 현상인 연기를 감지하게 되면 연기감지기의 정확한 위치를 알려주게 되어 있다. 그러나 rack 안에 연기감지기를 설치할 공간이 부족하거나 금액적인 문제로 모든 rack 공간에 연기감지기를 설치 하지 못한 경우에는 연기가 발생하는 정확한 위치를 찾을 수 없다. 그러므로 rack을 2x2 (4개 중에 1개) 또는 2x3 (6개 중에 1개)으로 묶어 1개의 연기 감지기가 설치되어 해당 rack을 관리한다. 1개의 연기감지기만으로는 연기의 발생 위치를 정확하게 발견할 수 없어 화재를 조기에 막을 수 없다.
본 논문에서는 2x2, 2x3 영역에 1개의 연기감지기가 설치되어 있는 환경에서는 연기감지기가 연기를 감지하여도 정확한 위치를 알 수 없는 문제를 해결하기 위해 연기를 감지한 감지기의 위치에서부터 카메라로 영상을 획득하면서 이미지 프로세싱을 이용하여 최초의 연기 발생지로 이동하는 방법을 연구 개발하고자 한다.
본 논문의 구성은 2장에서 연기감지기와 이미지 프로세싱 관련 연구를 분석하며, 3장에서는 이미지 프로세싱을 이용해 연기의 발생지로 찾아가는 방 법 및 기법을 제시한다. 4장에서는 설계에 따라 개발된 프로그램으로 이미지 프로세싱의 결과를 나타내고, 5장에서는 결론 및 향후 연구 방향에 대해 기술한다.
연기감지기의 종류에는 <표 1>과 같이 크게 이온화식 감지기와 광전식으로 분류된다.
연기감지기의 종류
이온화식 감지기는 검지부에 연기가 들어가면 전류가 변하는 것을 이용하여 연기를 감지하는 방식이고, 광전식 감지기는 검지부에 연기가 들어가는데 따라 광전소자의 입사 광량이 변화하는 것을 이용하여 연기를 감지하는 방식이다. 광전식 감지 기는 감지기 속의 밀폐된 공간에 공기가 깨끗할 때에는 빛의 산란이 발생하지 않는 특징이 있으므로 주변 환경이 깨끗한 rack형 자동화 창고에서의 사용이 적합하다[3].
2.2.1 이미지 프로세싱의 정의
이미지 프로세싱은 사진이나 영상을 처리하는 디지털 이미지 프로세싱을 의미한다. 디지털 이미지 프로세싱은 컴퓨터를 사용하여 입력받은 이미지를 처리하는 것이다. 그중에 컴퓨터 비전은 이미지나 영상에서 물체(Object), 전경(Foreground), 배경(Background) 등 물체와 주변 환경에 대한 데이터를 분석해서 유의미한 정보를 생성하는 기술이다[4].
2.2.2 컴퓨터 비전의 특징
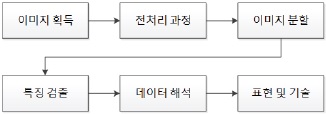
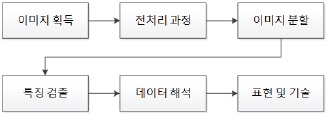
컴퓨터 비전은 입력된 영상의 객체나 패턴을 인식하여 필요한 정보를 이끌어 내는 것을 말한다. 컴퓨터 비전 기술을 응용하여 제품의 결함을 검사하거나, 문자 인식, 얼굴인식, 움직이는 물체의 검출 및 추적하는 분야에 사용된다[5]. <그림 1>과 같은 절차를 통해 컴퓨터가 사람처럼 인지하고 이해 할 수 있다[6].
2.2.3 객체 탐지 알고리즘
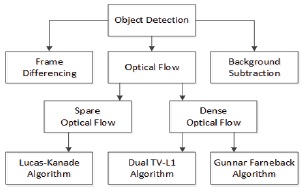
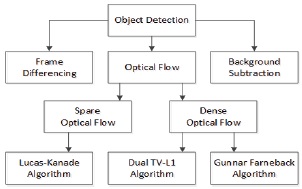
객체의 형태가 일정하지 않고 색의 구분도 명확하지 않는 연기라는 객체의 방향을 감지하기 위해서는 <그림 2> 와 같이 다양한 객체 탐지 알고리즘이 있다[7]. 그중에 Object Detection의 기술중에 하나인 Optical Flow 기술을 사용한다[8]. 이 기술은 차영상(difference image)의 진화 버전으로 이전 프레임에서의 특정 포인트를 추출하여 현재 프레임에서 같은 특정 포인트를 찾아 얼마만큼의 위치 변화가 있었는지를 분석하는 방식이다[9]. 특정 포인트의 분포가 움직이는 물체 부분에 밀집되게 되어 있어 객체 위치 인식 및 추적용으로 사용된다. 그러므로 물체가 어떻게 움직이고 있는지를 판단하기에는 가장 좋은 알고리즘이라고 할 수 있다.
optical flow 기술 중에는 밀집 광학 흐름(dense optical flow) 알고리즘과 희소 광학 흐름(sparse optical flow) 알고리즘이 있다. 그중에 밀집 광학 흐름 알고리즘인 파네백(Gunnar Farneback)이 개발한 다항식 확장 알고리즘을 활용하면 이미지에 있는 모든 픽셀을 모션 벡터로 할당하고 밀도가 높은 광학 흐름을 찾을 수 있다. 특정 포인트를 검출하는 희소 광학 흐름 알고리즘의 검출 방식보다 객체 검출에 대한 오류가 적고 움직임 데이터의 정확도가 높아진다[10].
희소 광학 흐름에서 가장 중요한 특정 포인트를 제대로 검출하지 못하면 객체의 움직임에 대한 정확성이 떨어진다. 하지만 밀집 광학 흐름은 모든 픽셀에 대해 밀도가 높은 광학 흐름을 찾기 때문에 정확도가 높다[11].
2.2.4 파네백 다항식 확장 알고리즘
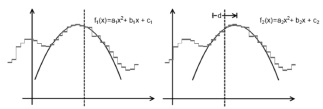
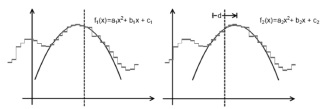
Gunnar Farneback[12] 알고리즘의 기본 개념은 모든 포인트에서 다항식을 이미지에 일치되도록 하여 이미지를 함수로 계산하는 것이다. 이미지를 이차 다항식과 각 포인트를 연관시키는 표현으로 변환한 후 다항식을 픽셀 주변 영역의 중심에 좀 더 가까운 포인트에 가중치가 적용되도록 계산한다. 이미지 일부분의 작은 변위는 같은 포인트에서 다항식 확장의 계수에 해석적으로 계산될 수 있어 해당 변위의 크기를 구할 수 있다.
<그림 3>과 같이 1차원의 경우 이미지는 작은 변위 d의 왼쪽과 오른쪽의 그레이 히스토그램으로 표현된다. 임의의 점선은 포물선 곡선에서 근처의 강도 값에 맞출 수 있다. 평활 함수
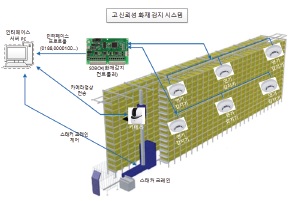
본 논문에서는 서버 PC와 연기 감지기의 연결, 서버 PC와 스태커 크레인의 연결, 서버 PC와 카메라의 연결로 설계하여 서버 PC에서 실시간으로 연기가 감지된 연기감지기의 위치 정보와 스태커 크레인의 제어 및 카메라의 영상 데이터를 받을 수 있도록 구성한다.
<그림 5>와 같이 SDBOX(Smoke Detect Box)에서 연기 감지기로부터 받은 데이터를 취합하여 서버 PC로 전달한다. 서버 PC는 연기가 감지된 위치로 스태커 크레인을 이동시킨다. 스태커 크레인에 설치되어 있는 카메라 영상을 서버 PC에서 획득한다. 획득한 영상에 대해 이미지 프로세싱을 진행하여 연기의 방향을 분석하고 연기가 발생하는 방향으로 스태커 크레인을 이동시킨다. 그래서 연기가 발생하는 rack의 위치를 발견할 수 있는고 신뢰성 화재 감지 시스템을 설계한다.
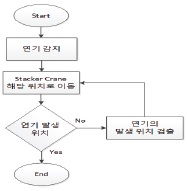
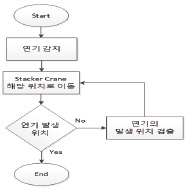
연기가 발생하는 위치를 찾기 위한 시스템에 대한 전반적인 프로세스 순서도이다. <그림 6>과 같이 연기감지기가 연기를 감지하면 스태커 크레인을 해당 위치로 이동시킨 후 연결된 카메라에서 영상을 수신 받는다. 영상에서 연기의 방향을 탐지하여 연기의 발생 위치로 스태커 크레인을 이동시 키는 과정을 반복한다. 그래서 연기가 발생하는 최초의 위치를 찾아가는 프로세스를 설계했다.
연기감지기와 서버 PC와의 통신은 소켓 통신기술을 기반으로 연기 감지기에서 전달되는 데이터를 서버 PC에서 받을 수 있도록 설계한다.
데이터의 전송 주기는 5초마다 한 번씩 소켓 통신으로 서버 PC에 전달 되도록 하여 연기가 감지된 위치를 알 수 있게 된다.
SDBOX에서 수신 프로토콜
<표 2>와 같은 메시지 형식을 정의하여 위치 정보를 확인할 수 있고 연기감지기에서 연기의 감지 유무를 확인할 수 있도록 설계한다.
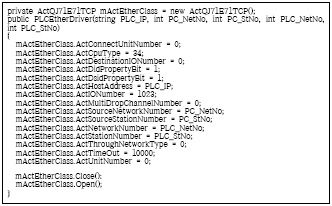
서버 PC에서 스태커 크레인에 위치정보를 전달할 수 있도록 <그림 7>과 같이 스태커 크레인을 작동시키는 PLC와의 Ethernet 통신으로 연결한다.
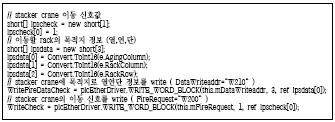
<그림 8>은 연결된 PLC에 목적지 rack의 위치 정보를 write 하고 스태커 크레인의 이동 명령을 전송하면 해당 rack의 위치로 이동한다.
서버 PC와 카메라는 Rtsp 및 http 프로토콜을 이용하여 아래의 함수를 이용하여 접속하여 전송되는 영상을 객체 추적 알고리즘을 적용하여 연기의 방향을 분석할 수 있게 된다.
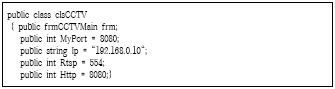
<그림 9>과 같이 카메라에 연결하기 위한 함수를 설계하였고, <그림 10>에서는 카메라와 연결하기 위한 clsCCTV 클래스를 정의하였다.
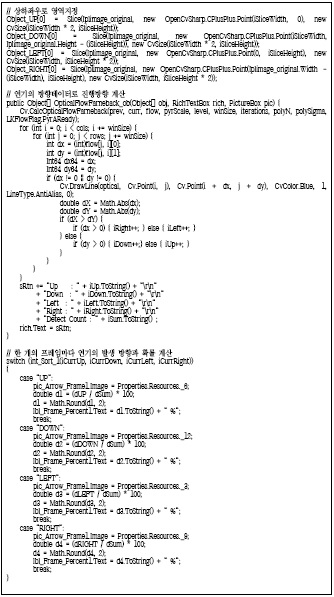
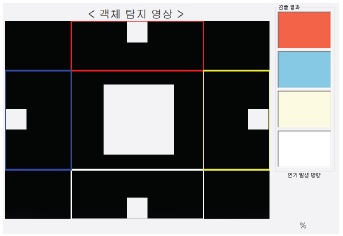
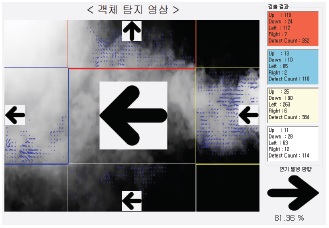
<그림 11>과 같이 연기의 진행 방향을 결정하기 위해서 영상을 상하좌우 4방향으로 나누었다. 그리고 각각의 영역 안에서 움직이는 객체만을 방향 데이터로 사용하였다. 그래서 영역별 연기의 진행 방향을 계산하고 진행 방향에 대표 방향을 계산하였다. 이러한 진행 방향 데이터를 취합해 연기의 발생 방향과 방향에 대한 확률을 계산하였다.
연기의 방향을 분석하기 위해 화면 전체를 분석하는 것이 아니라 각각의 면에 일정 크기만큼의 ROI(Region Of Interest)[16]를 기준으로 파네백 다항식 알고리즘을 적용하여 연기의 흐름을 검출되게 하였다.
<그림 12>와 같이 4개의 방향에 ROI가 설정된 영역만을 사용함으로 연기의 방향을 결정하는 것에 방해되는 영역인 중심부의 데이터가 제외되어 연기 검출의 정확도를 높였으며, 불필요한 연산을 처리하지 않아 연산 시간이 개선되어 파네백 다항식 알고리즘의 단점을 보완했다. 이와 같은 알고리즘을 적용하여 획득한 영상을 기반으로 연기의 방향을 찾아내는 실험을 진행한다.
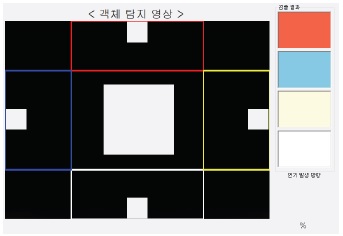
첫 번째 테스트 케이스는 연기의 방향이 오른쪽에서 왼쪽 위로 이동하는 영상을 사용한다. <그림 13>과 같이 ROI로 지정한 사각의 영역에 움직임이 있는 객체를 탐지하여 픽셀들이 움직이는 방향을 분류하였다. 객체들의 방향 검출 결과 중에 가장 많은 건수를 기록한 방향을 해당 ROI의 객체 탐지 방향으로 결정하였다. 그리고 4개의 ROI 중에서 가장 많은 객체가 검출된 ROI의 객체 탐지 방향이 해당 영상 프레임의 최종 방향으로 결정된다. 이러한 알고리즘으로 연기 방향 데이터를 취합하여 연기의 발생 위치를 확인했다.
두 번째 케이스는 실제 현장에서 얻어진 영상을 기준으로 연기의 방향을 검출하였다.
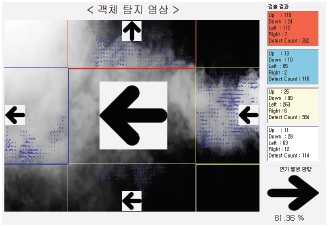
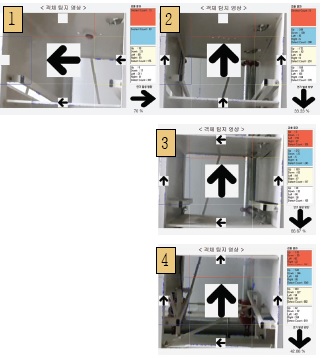
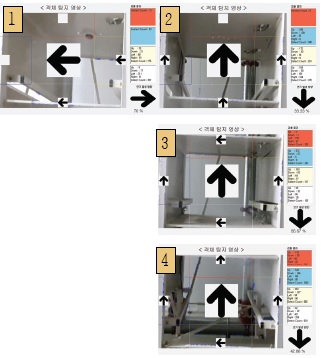
<그림 14>와 같은 2x3 구조에 좌측 상단의 rack에 1개의 연기 감지기가 설치되어 있다. 연기 감지기가 연기를 감지한 위치에서 카메라를 통해 획득한 영상으로 아래와 같은 연기의 흐름이 검출되었다.
<그림 15>와 같이 1번 화면에 설치된 연기감지기에서 연기를 감지했고 연기의 진행 방향은 오른쪽에서 왼쪽으로 검출되어 스태커 크레인을 오른쪽으로 이동시켰다. 2번 화면에서는 연기의 진행 방향이 아래쪽에서 위쪽으로 검출되어 스태커 크레인을 아래쪽으로 이동시켰다. 이와 같은 방법으로 연기의 진행 방향을 역 추적한 결과 4번의 위치에서 연기가 시작되어 1번에 있는 연기감지기에서 연기가 감지된 것을 알 수 있다. 그래서 이미지 프로세싱으로 연기를 추적하여 연기가 발생되는 위치를 확인하였다.
본 논문은 객체 탐지 알고리즘으로 연기의 진행 방향을 검출하고 연기의 발생지를 확인했다. 소량의 연기감지기를 설치하고 영상을 이용한 이미지 프로세싱을 적용함으로써 모든 rack에 연기감지기를 설치할 필요가 없어졌다. 또한, 모든 rack에 연기감지기가 설치되지 않은 rack형 창고에서 추가적으로 연기감지기를 설치할 필요 없이 카메라를 설치하여 연기가 발생하는 위치를 찾을 수 있게 되었다.
향후 연구 과제로는 연기 감지기의 오작동 여부를 확인하기 위한 이미지 프로세싱 방안을 연구하고, 연기의 발생 위치를 판단하기 위한 방법으로 다양한 카메라들을 이용하여 연구해보면서 시스템의 기능을 향상시키는 연구가 필요하다.