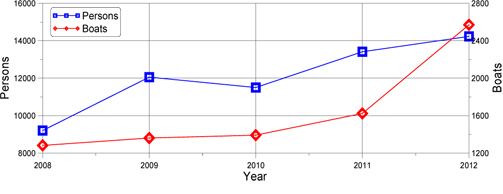
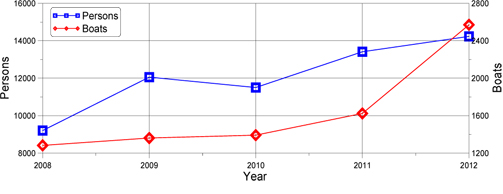
사람들의 1인당 국민소득이 증가하면서 여가선용에 대한 욕구와 해양 레포츠에 대한 관심이 증대되고 있다(Fig. 1). 우리나라는 3면이 바다로 둘러싸여 있고, 국내 어디에서도 바다로의 접근성이 좋으므로 앞으로 해양 레포츠 수요는 계속하여 증가할 것으로 예상된다. 이러한 해양 레포츠의 적극적인 보급을 위해서 정부에서는 요트를 비롯한 레저선박을 계류하고 관리할 수 있는 마리나를 전국에 조성하고 있다 (Committee on the development of East, West and South coastal region, 2010).
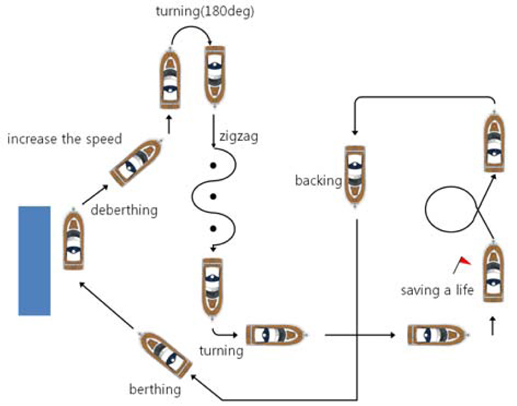
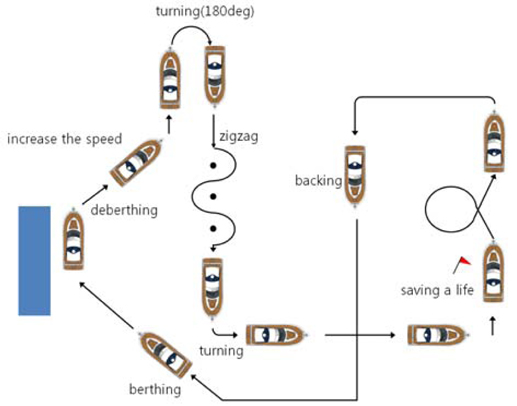
해양 레포츠의 하나인 최대 출력이 5마력 이상인 수상레저기구를 조종하고자 하는 사람은 일반조종면허 및 요트조종면허를 취득하여야 한다. 일반조종면허 실기시험은 Fig. 2와 같은 다양한 조종패턴으로 구성되어 있다 (Kang & Yoon, 2013).
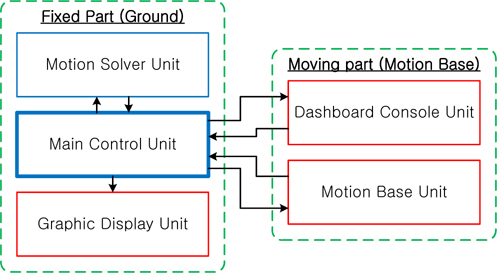
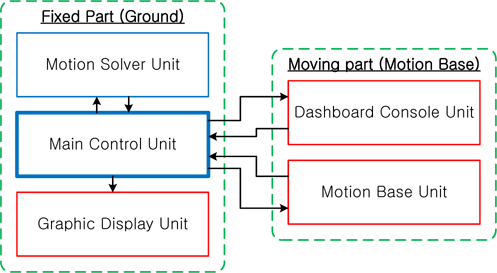
따라서, Fig. 2의 다양한 조종패턴에 대하여 익숙해질 때까지 어느 정도의 실습이 필요한데 아직까지는 편리하게 마리나에 접근하여 레저선박을 운항하기 어렵고, 그 비용도 만만치 않은 실정이다. 만약 레저선박의 조종형태에 따른 운동 특성과 주변 상황을 잘 모사할 수 있는 레저선박 시뮬레이터를 이용할 수 있다면 실제 해상에서의 실습시간을 대폭 줄일 수 있다. 레저선박 시뮬레이터는 일반적으로 Fig. 3과 같이 육상 고정부와 선체 가동부로 구성할 수 있다. Fig. 4에는 일반적인 레저선박 시뮬레이터의 구성도와 시운전 광경을 도시하였다 (Kang & Yoon, 2013).
레저보트 시뮬레이터를 이용하여 실질적인 조종실습을 하기 위해서는 레저선박 운동을 실제와 유사하게 모사하여야 하고, 이는 Fig. 3의 운동계산 처리장치(Motion Solver Unit, MSU) 내 운동 수학모형이 정확하게 정립되어야 한다. 고속 레저선박은 활주선형(planing hull)으로 제작되어 선외기 또는 선내기와 워터제트 및 프로펠러 조합으로 구성되어진다. 이러한 선박은 속력이 증가함에 선저에 큰 양력이 작용하여 선체가 부상하고 선박과 물의 접촉면적을 줄이게 된다. 따라서, 기존 대형 상선의 조종운동을 모델링 할 때처럼 흔히 수직면 운동 및 횡동요를 무시하고 수평면 운동으로만 모델링 하는데는 문제가 있다.
Savitsky (1964)는 주형활주선(prismatic planing hull)의 속력에 따른 선저와 차인의 침수길이, 자세각, 저항 및 유효마력의 계산식을 유도하였고, Lewandowski (1997; 2004)는 활주선의 수평면 안정성 해석을 위하여 활주선의 주요제원이 주어지면 선형 동유체력미계수들을 구할 수 있도록 경험식을 제안하였다. Yoon, et al. (2006)은 실선시험 결과를 이용하여 고형부력선(Rigid hull inflatable boat)의 저항·추진 모델을 식별하였다. Yoon, et al. (2014)은 20 ft급 레저선박의 실선 시운전 절차를 제안하고, 그 결과를 통하여 20 ft급 레저선박의 운동 특성을 분석하였다.
본 논문에서는 레저선박의 6자유도 운동방정식을 정립하고, 흘수 및 자세각 변화에 따른 정유체력 변화, 속력 및 자세각 변화에 따른 수평면 동유체력미계수 변화, 양력 및 모멘트계수 변화를 모델링하였다. 이렇게 정립된 운동방정식을 이용하여 Fig. 2의 다양한 조종패턴에 대한 시뮬레이션을 수행하였고, 그 결과를 실선 시운전 결과와 정성적으로 비교하였다.
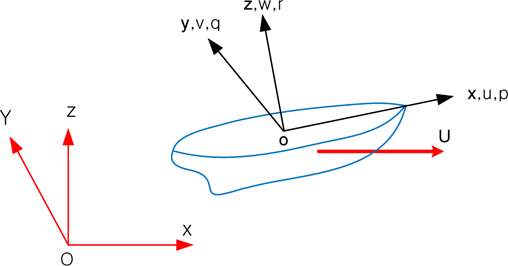
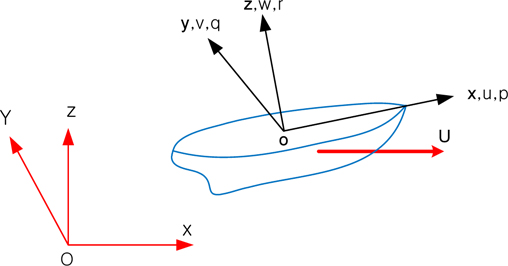
레저선박의 운동방정식을 기술하기 위해서는 Fig. 5와 같이 2개의 좌표계가 필요하다. 첫 번째는 레저선박의 위치와 자세각을 정의하기 위하여
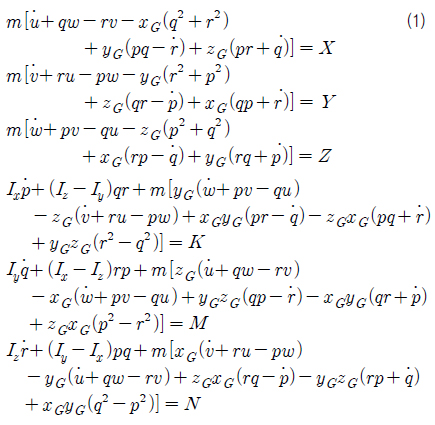
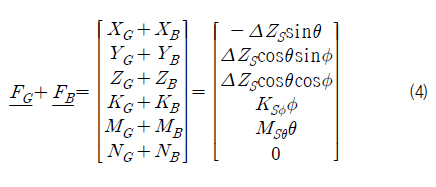
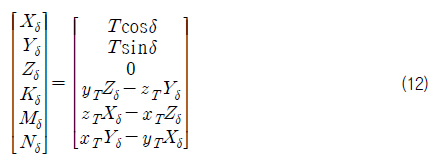
레저선박의 6자유도 운동방정식은 Fig. 5의 레저선박고정좌표계에 대하여 Newton 제 2법칙을 이용하여 기술할 수 있다.
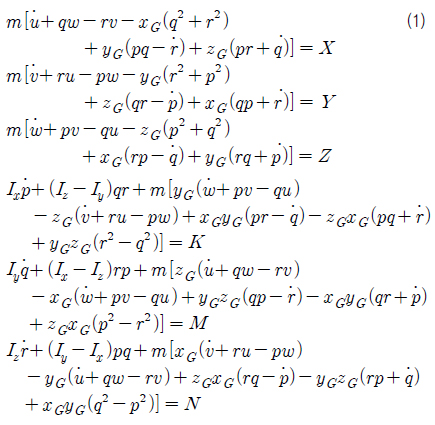
여기서,

여기서, 하첨자
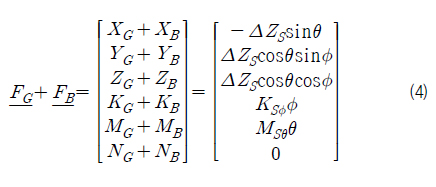
중력 및 정유체력의 크기는 다른 힘들에 비하여 상당히 크므로 중력 및 정유체력을 각각 모델링 하면 시뮬레이션 초기 단계에서 평형상태에 도달하는데 오랜 시간이 걸리거나 수치해석적으로 불안정한 운동을 할 수 있다. 따라서, 중력은 일정하고 레저선박의 부상에 따른 정유체력과의 변화량으로 중력 및 정유체력을 모델링한다.
정유체력의 변화는 종동요각의 변화를 고려하지 않고 레저선박고정좌표계 원점의 지구고정좌표계에 대한 부상 위치인

여기서,
흘수 변화에 따른 정유체력의 변화량만이 중력 및 정유체력 변화에 영향을 주고, 횡동요 및 종동요 복원모멘트 계수는 Lewandowski의 경험식을 적용하면 다음과 같다.
여기서,
Lewandowski의 경험식에서는 메타센터반경(

여기서,
식 (5)와 선체 측벽효과 계수

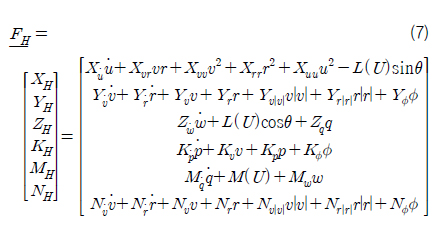
동유체력은 다음과 같이 양력계수(
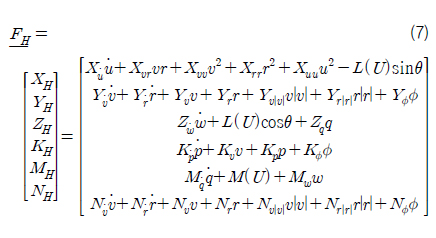
수평면 동유체력미계수는 Lewandowski (1997)가 활주선의 수평면 안정성 해석을 위하여 도출한 경험식을 이용한다. 안정성 해석은 평형상태를 정의하고. 외란에 의한 운동이 매우 작은 경우에 대하여 수행한다. 따라서, Lewandowski의 경험식에 의하여 얻어지는 계수들은 평형상태가 바뀌면 달라져야 한다. 평형상태의 변화가 동유체력미계수에 미치는 영향을 고려하기 위하여 여러 직진 속력에 대하여 정상항주상태를 계산하고, 각 상태별로 동유체력미계수를 구한 후, 속력변화에 따른 계수변화를 속력에 대한 2차식으로 나타내기로 한다.
전후동요 동유체력미계수에서 부가질량계수 와 편류각에 의한 저항증가를 나타내는 동유체력미계수

정상상태 저항은 속력에 따라서 계산된 전체저항을 이용하여 모델링한다.
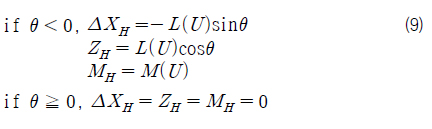
레저선박이 트림졌을 때 선저에 작용하는 양력은 레저선박의 속력, 평균 침수길이 등에 따라 달라지게 된다. 시뮬레이터와 같은 넓은 속력범위를 고려해야 하는 경우는 양력계수와 양력모멘트계수를 속력의 함수로 나타내는 것이 편리하다. 본 논문에서는 준정상상태를 가정하여 비정상상태에서도 속력이 정상상태와 같다면 모든 자세관련 변수가 같다고 가정하고, 속력에 따른 정상상태에서의 양력계수와 압력중심이 비정상상태에서도 동일하게 적용될 수 있다고 가정한다. 이 때 양력계수와 압력중심점은 Lewandowski (2004)의 경험식을 적용한다.
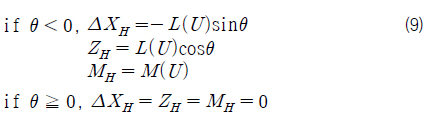
Lewandowski (2004)의 선저 양력은 레저선박의 자세변화에도 변하지 않는 등속이동좌표계에서 상방향을 양의 방향으로 설정하였으므로, 레저선박고정좌표계에 대한 값으로 변환해 주어야 한다. 또한, 앞에서 언급한 바와 같이 종동요각이 0°보다 큰 경우에는 양력과 양력모멘트는 0이 되어야 한다.
속력에 따른 양력계수의 변화는 속력에 대한 최적차수의 다항식으로 모델링 한다.
수직면 동유체력 모델에서
레저선박의 추진동력장치는 일반적으로 디젤기관과 워터제트의 조합을 사용하거나 엔진과 추진기의 일체형으로 되어 있는 선외기를 많이 사용한다. 본 연구에서는 추진장치로서 워터제트 추진기를 적용하고, 임펠러의 회전수는 선형적으로 증감하고, 조종자가 엔진 쓰로틀을 이용하여 엔진회전수를 조정하면 추진력이 바로 발생한다고 가정한다.
워터제트 추진기는 다음과 같이 유동관로 내에 설치된 임펠러가 물을 가속시킴에 따라서 발생하는 속도차이를 이용하여 추진력을 얻는다.

여기서,
식 (10)에서 추진력을 계산하기 위해서는 실시간으로 변화하는 제트의 속력을 알아야 한다. 제트의 속력은 회전수의 함수가 되는 항주속력
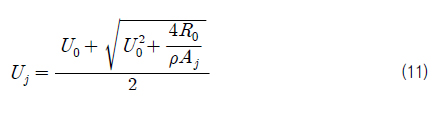
결국, 임펠러 또는 엔진회전수와 항주속력 간의 관계식에 따라 회전수를 입력하면 항주속력이 결정되고, 이 항주속력과 Savitsky의 관계식을 이용하여 전체저항을 추정한다. 이렇게 추정된 전체저항을 식 (11)에 대입하면 제트의 속력을 알 수 있다.
일반적으로 소형선박은 타(Rudder)를 사용하지 않는다. 선외기를 사용하는 선박은 선외기의 추력방향을 변경하여 추진력과 동시에 방향제어력을 얻고, 워터제트 추진기를 사용하는 경우도 워터제트 분사 버킷각을 변경하여 방향제어력을 얻는다. 따라서 각 운동방향의 추진력과 방향제어력은 다음 식과 같이 모델링 할 수 있다.
여기서,
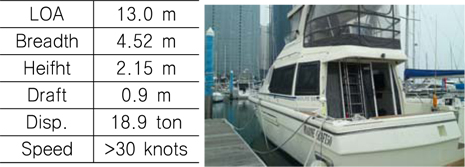
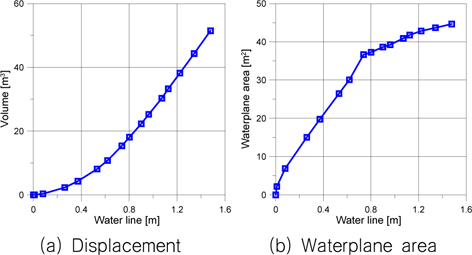
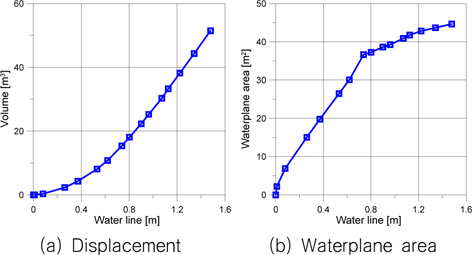
본 논문에서는 40 ft급 레저선박을 대상선박으로 선정하였다. Table 1에는 대상선박의 주요제원을 나타내었고, Fig. 6에는 대상선박의 흘수별 배수용적 및 수선면적 변화값을 도시하였다.
[Table 1] Principal dimensions of target ship
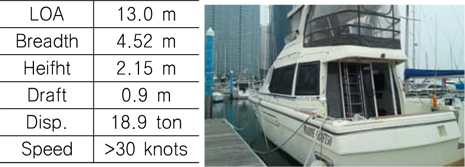
Principal dimensions of target ship
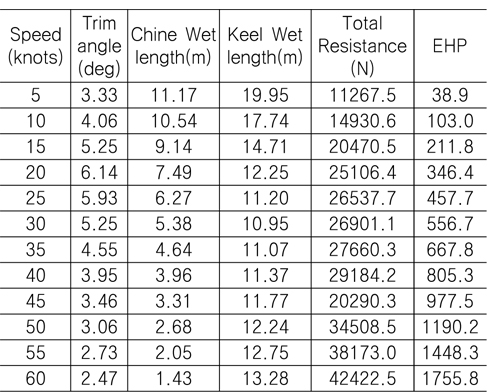
Table 1의 대상선박에 대하서 Savitsky 식으로부터 계산된 정상항주 상태를 Table 2에 나타내었다. 이 값들은 자세에 따라 변하는 동유체력미계수를 구하는데 입력값으로 적용되어 간접적으로 동유체력미계수에 대한 속력 영향을 반영하게 된다.
[Table 2] Steady state values depending on the speed
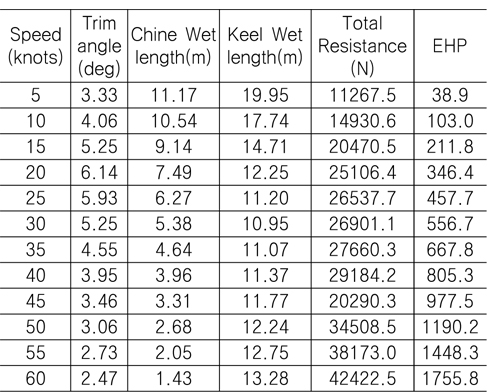
Steady state values depending on the speed
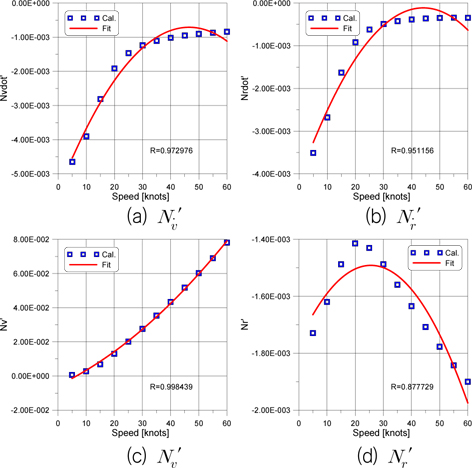
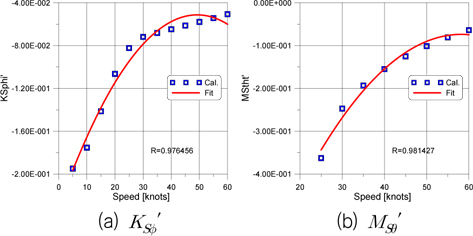
특정 속력에서 Lewandowski의 경험식을 이용하여 추정된 전후동요, 좌우동요, 횡동요, 선수동요 동유체력미계수를 다음과 같이 항주속력에 대한 2차식으로 모델링한다.

여기서, 레저선박 속력 단위는 m/s이다.
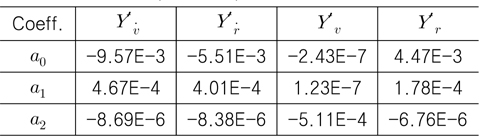
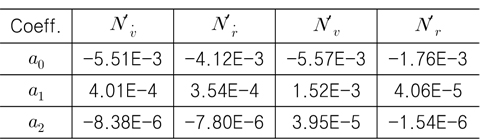
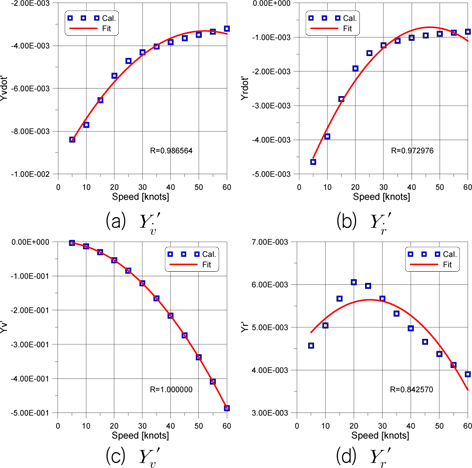
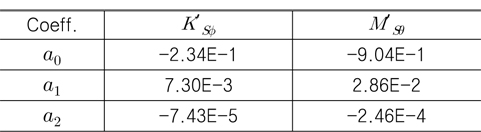
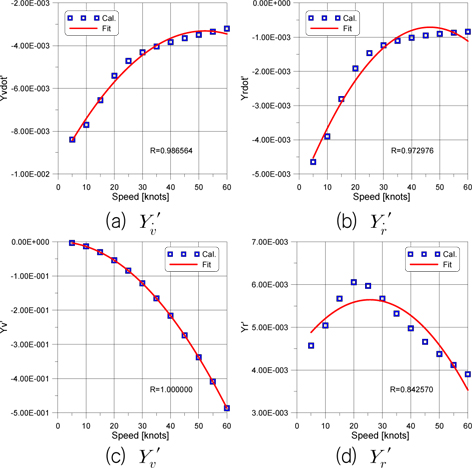
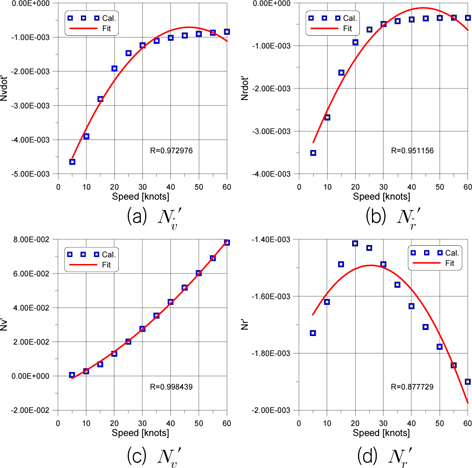
Table 3과 Table 4에는 좌우동요, 선수동요에서 대표적인 무차원(계수 우측에 ′ 표시) 동유체력미계수들에 대한 2차식 계수들을 나타내었다. Fig. 7과 Fig. 8에는 Table 3과 Table 4 에 나타낸 계수들에 대하여 속력에 따른 값 변화 및 곡선맞춤 결과를 도시하였다.
[Table 3] Typical speed-dependent coefficients (Sway)
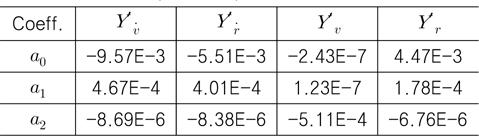
Typical speed-dependent coefficients (Sway)
[Table 4] Typical speed-dependent coefficients (Yaw)
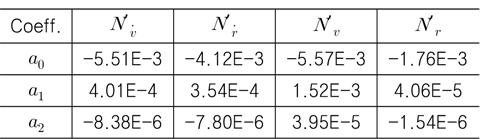
Typical speed-dependent coefficients (Yaw)
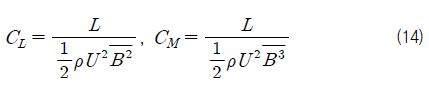
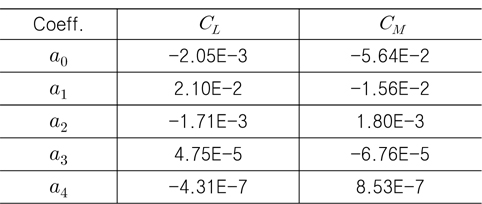
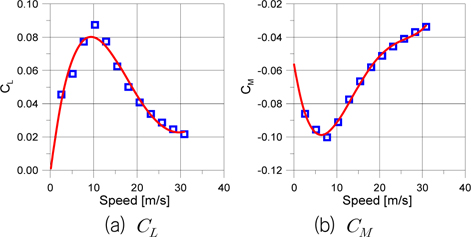
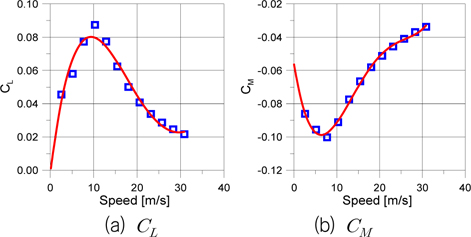
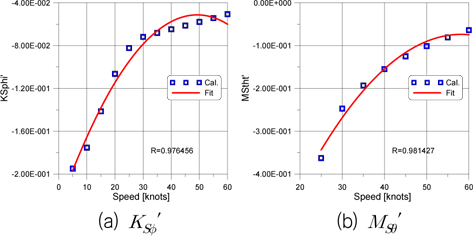
속력에 따른 양력계수, 양력모멘트계수의 변화도 수평면 동유체력미계수와 마찬가지로 속력에 대한 다항식으로 모델링하는데 그 차수는 4차로 한다. 다음은 양력계수와 양력모멘트계수의 무차원 방식인데 각 속력에서의 평균 침수차인 폭을 이용하고,
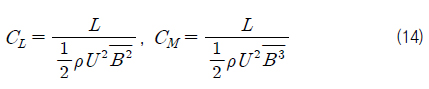
Table 5에는 양력계수와 양력모멘트계수의 속력에 대한 4차식 계수들을 나타내었고, Fig. 9에는 Table 5에 나타낸 계수들에 대하여 속력에 따른 값 변화 및 곡선맞춤 결과를 도시하였다.
[Table 5] Speed-dependent coefficients (Lift and moment)
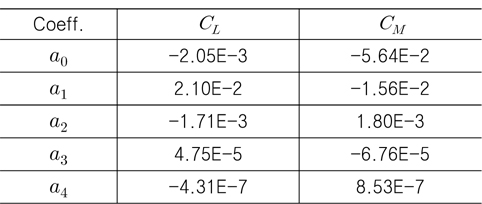
Speed-dependent coefficients (Lift and moment)
레저선박 복원력계수도 자세에 따라 변하게 된다. 수평면 동유체력미계수와 마찬가지로 복원력계수의 변화를 속력에 대한 2차식으로 모델링 한다. Table 6에는 복원력계수의 속력에 대한 2차식 계수들을 나타내었고, Fig. 10에는 Table 6에 나타낸 계수들에 대하여 속력에 따른 값 변화 및 곡선맞춤 결과를 도시하였다.
[Table 6] Speed-dependent coefficients (Restoring moment)
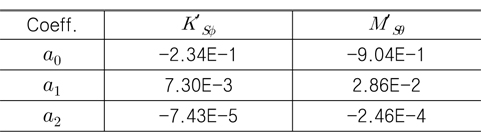
Speed-dependent coefficients (Restoring moment)
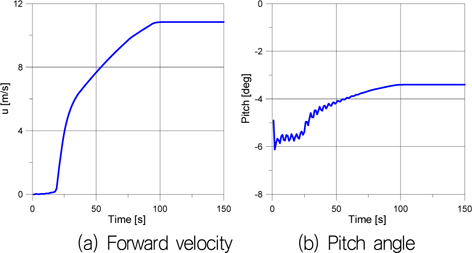
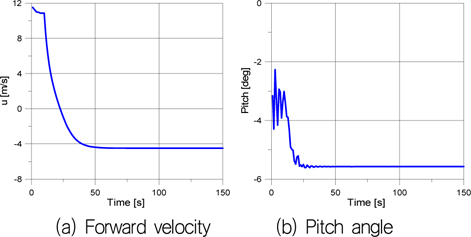
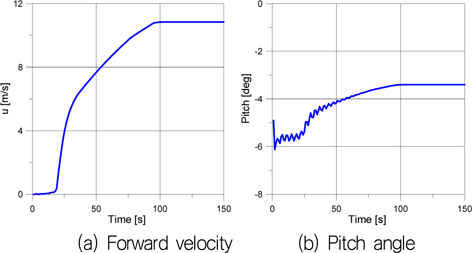
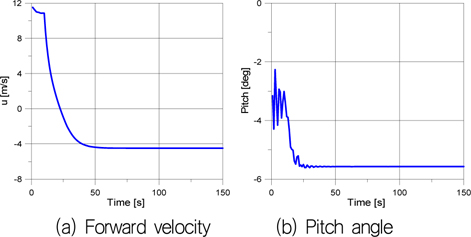
Fig. 11과 Fig. 12에는 각각 가속, 감속 후 후진시의 속력 및 자세각 변화를 도시하였다. 후진시에는 선저 양력이 없고, 추진력은 전진시보다 효율이 감소한다고 가정하여 선형 동유체력미계수와 정지상태에서의 복원력계수를 이용하여 동유체력을 모델링하였다.
Fig. 11과 Fig. 12에 의하면 초기에는 아직 정력학적으로 안정화 되지 않은 상태이므로 종동요각이 약간 진동하는 것을 볼 수 있고, 가감속 경우 모두 속력이 0 m/s 근처에서는 유체 동력학적 감쇠력이 작게 작용하므로 선박 고유주기로 운동한다.
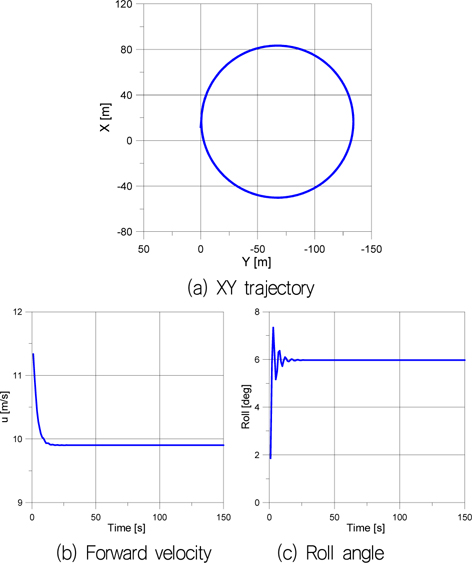
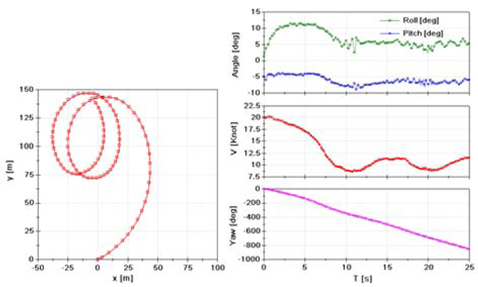
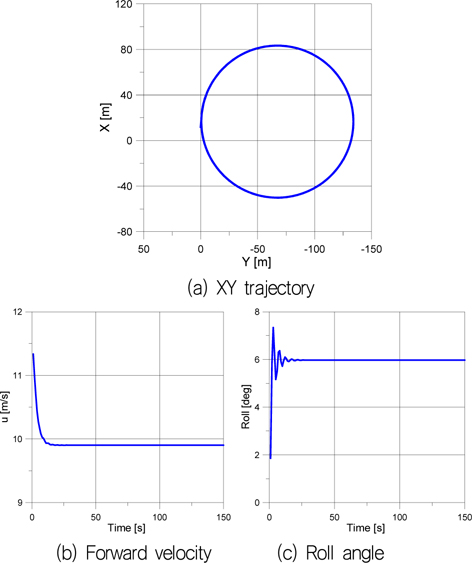
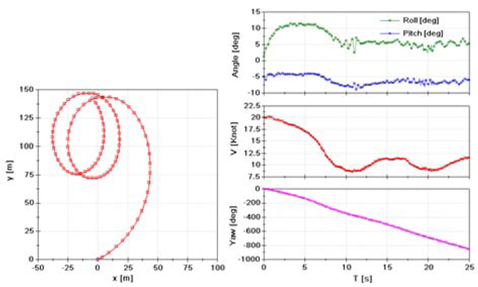
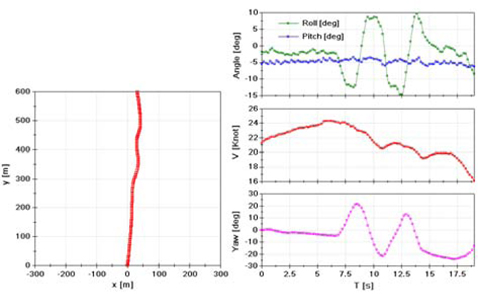
레저선박이 초기 속력 12 m/s로 항주하면서 워터제트 버킷각을 10° 변경하여 우현 선회할 때, Fig. 13에 선회궤적과 전후동요 속도 및 횡동요각을 도시하였다. Fig. 14에는 대상선박과는 다른 20 ft급 레저선박의 좌현선회 실선시험 결과를 도시하였다(GCSC, 2013). 여기서, 양의 횡동요각은 좌현 방향이고, 음의 종동요각은 선수가 들리는 경우이다.
고속 선박일수록 과도하게 선회하지 않는 경우에는 직진성이 좋으므로 속력변화가 적고, 일반 대형 상선과는 달리 선회 방향으로 내방 경사가 일어난다. Fig. 13에 의하면 속력 감소는 적고, 우현 선회시 우현 횡동요가 일어나는 것을 볼 수 있다. Fig. 14의 실선 시운전 결과와 비교하면 일단 선회가 시작되면 속력 감소가 일어나고 선회방향과 동일한 방향으로 횡동요가 발생하는 동일한 경향이 확인된다.
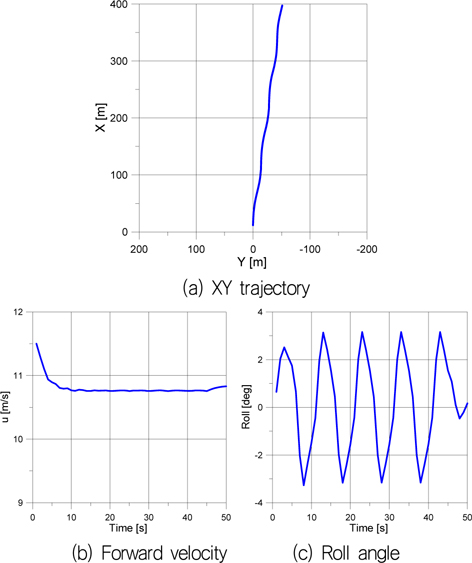
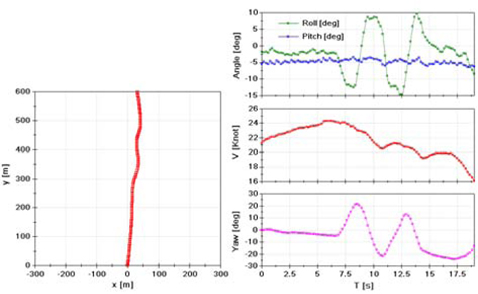
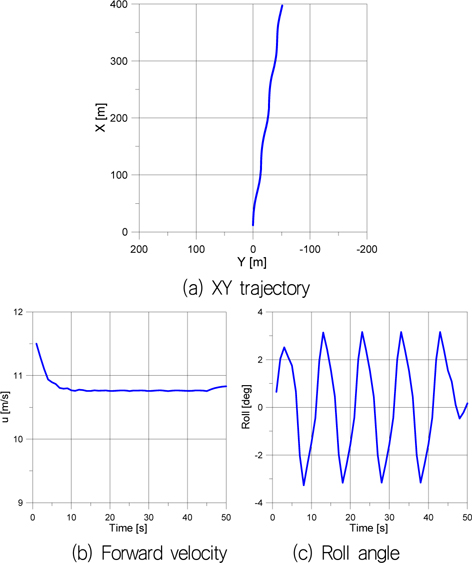
레저선박이 초기 속력 12 m/s로 항주하면서 워터제트 버킷각을 5초 주기로 10°씩 9회 변경하여 사행(zig-zag 시험)할 때 Fig. 15에 궤적과 전후동요 속도 및 횡동요각을 도시하였다. Fig. 16에는 20 ft급 레저선박의 사행 실선시험 결과를 도시하였다.
Fig. 15의 사행시험 결과는 Fig. 13의 선회시와 유사한 양상을 보이고 있다. 선회각이 크지 않으므로 속력 변화가 적고, 횡동요는 선회 방향과 동일한 위상을 가지고 발생하는 것을 볼 수 있다. 횡동요는 선회시에는 약 6° 정도로 일어나지만, 사행시에는 과도 상태이므로 절반 정도의 횡동요가 주기적으로 발생하는 것을 볼 수 있다. Fig. 16의 실선 시운전 결과와 비교하면 침로각이 바뀔 때 20 ft급 레저선박의 결과 보다 횡동요가 적게 일어나고 있다. 이러한 결과적인 운동 크기를 이론적인 방법으로만 실제와 유사하게 맞추는데는 어려움이 있다. 앞으로 40 ft급 대상선박의 실선시운전을 통하여 동유체력미계수 등을 조정하는 것이 보다 실용적인 방법이라고 사료된다.
본 논문에서는 레저선박 조종면허시험시 실습용으로 사용할 수 있는 시뮬레이터 구성에 필수적인 운동 모델을 정립하였다. 활주선형을 갖는 레저선박은 속력 및 조종패턴에 따라 자세변화가 크므로 일반적인 수평면 조종운동방정식에 수직면 모델을 추가하여야 실제와 유사한 운동을 모사할 수 있다. 수평면 및 수직면 동유체력미계수, 양력계수, 모멘트계수는 속력별로 계산된 자세 변수들을 Lewandowski 경험식의 입력으로 하여 시뮬레이션 시간 동안 변하는 값들로 모델링 하는 방법을 제안하였다.
40 ft급 레저선박을 대상선박으로 선정하여 가속, 감속 및 후진, 선회, 사행의 조종패턴에 대하여 시뮬레이션을 수행하였다. 시뮬레이션 결과, 일반적인 활주선형을 갖는 레저선박의 운동패턴과 유사하게 모사되는 것을 확인하였지만 실제 운동 크기 및 고유주기 운동 등이 실제와 유사한 지는 대상선박과 동일한 실선 시운전을 통하여 확인하여야 한다.
향후에 40 ft급 대상선박의 실선 시운전을 통하여 일부 계수들의 튜닝 등과 같은 시스템 식별 과정을 통하여 실용적으로도 실제와 유사한 결과를 제공하는 운동 모델을 정립하여야 한다.